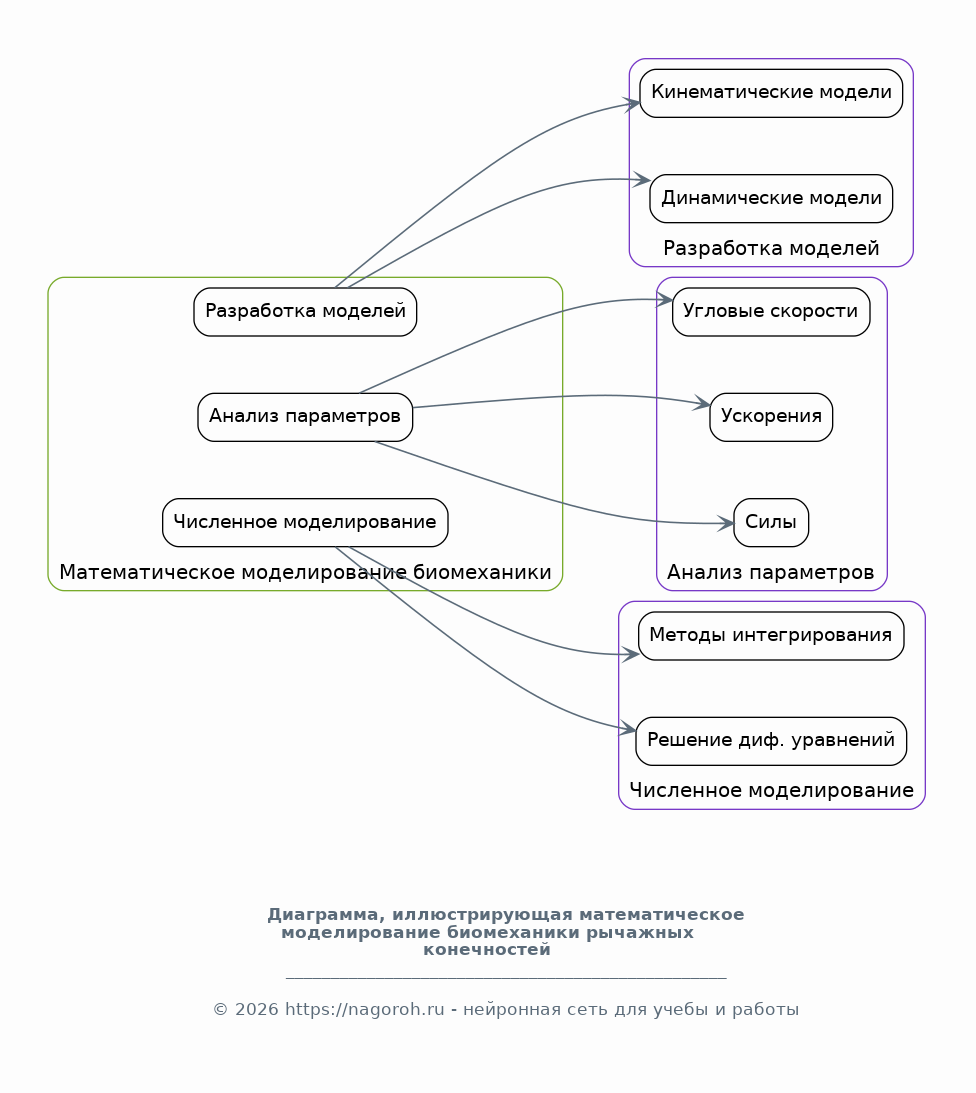
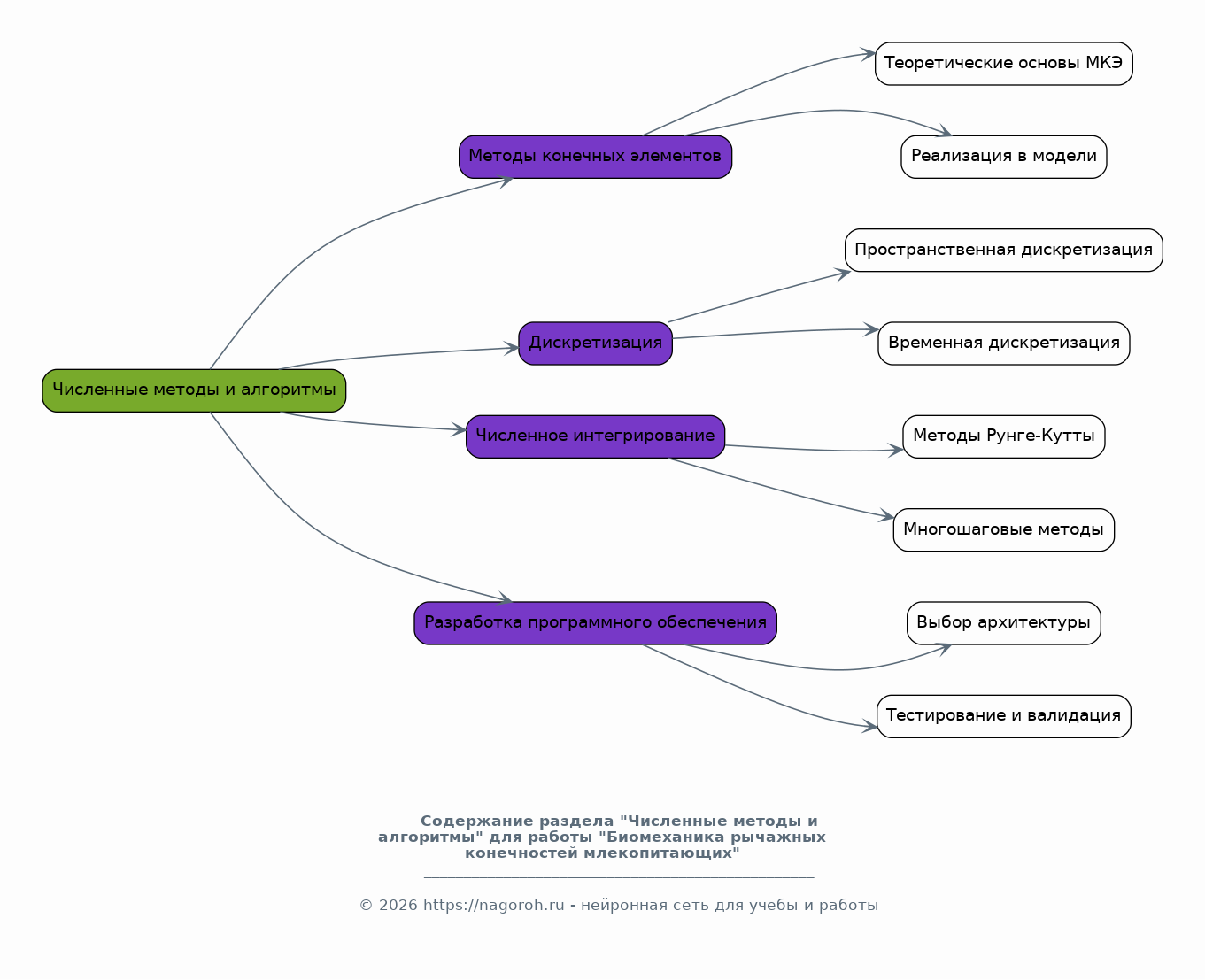
Данный исследовательский проект посвящен детальному изучению биомеханики рычагов конечностей у млекопитающих, с акцентом на разработку точных расчетных методик и создание детализированных компьютерных моделей. Исследование охватывает анализ кинематических и динамических характеристик движений, включая переход от статичных положений к динамическим нагрузкам. Особое внимание уделяется выявлению ключевых механических параметров, таких как моменты сил, распределение напряжений и эффективность передачи энергии. Результаты проекта позволят глубже понять принципы локомоции и адаптации опорно-двигательного аппарата млекопитающих к различным условиям среды, а также послужат основой для разработки биоинженерных решений и роботизированных систем, имитирующих естественные движения. Проект предусматривает использование современных методов анализа данных и программных средств для моделирования.