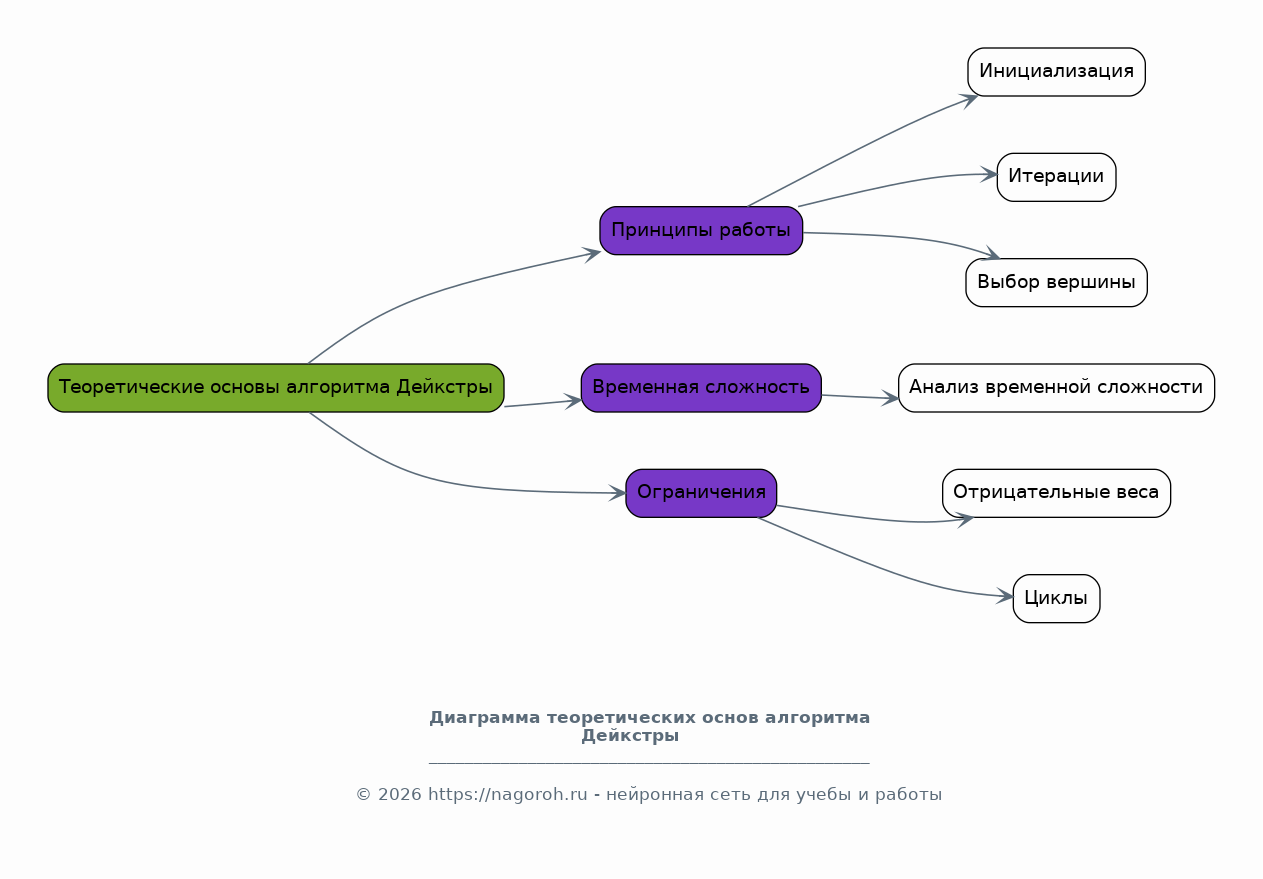
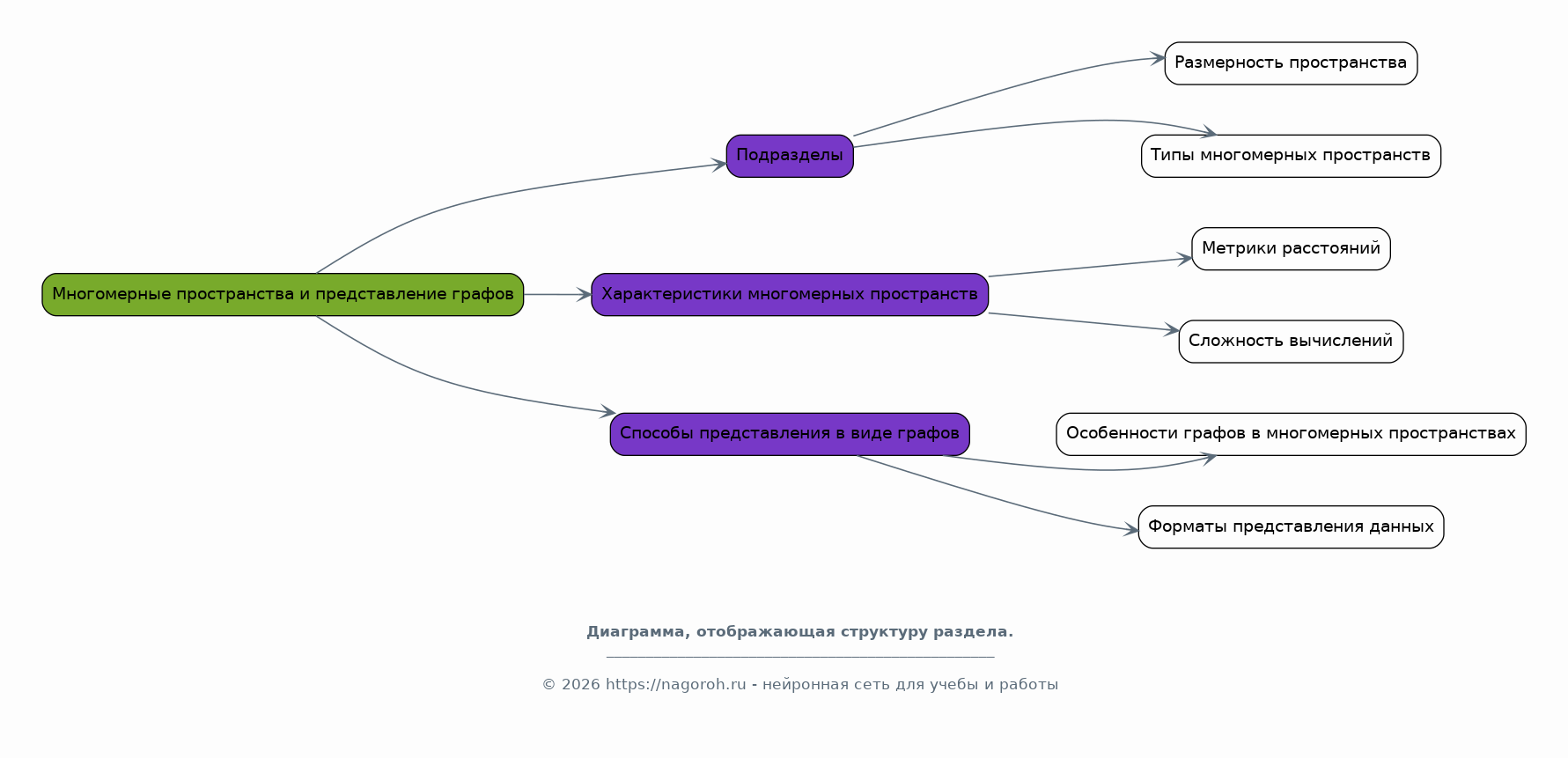
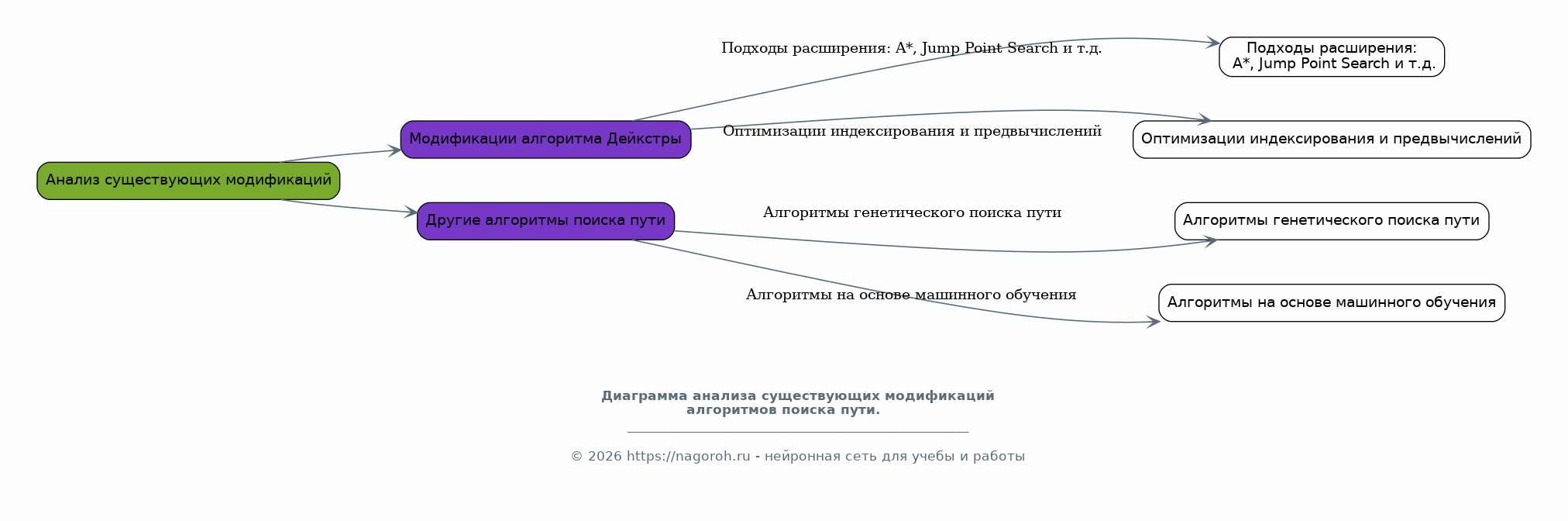
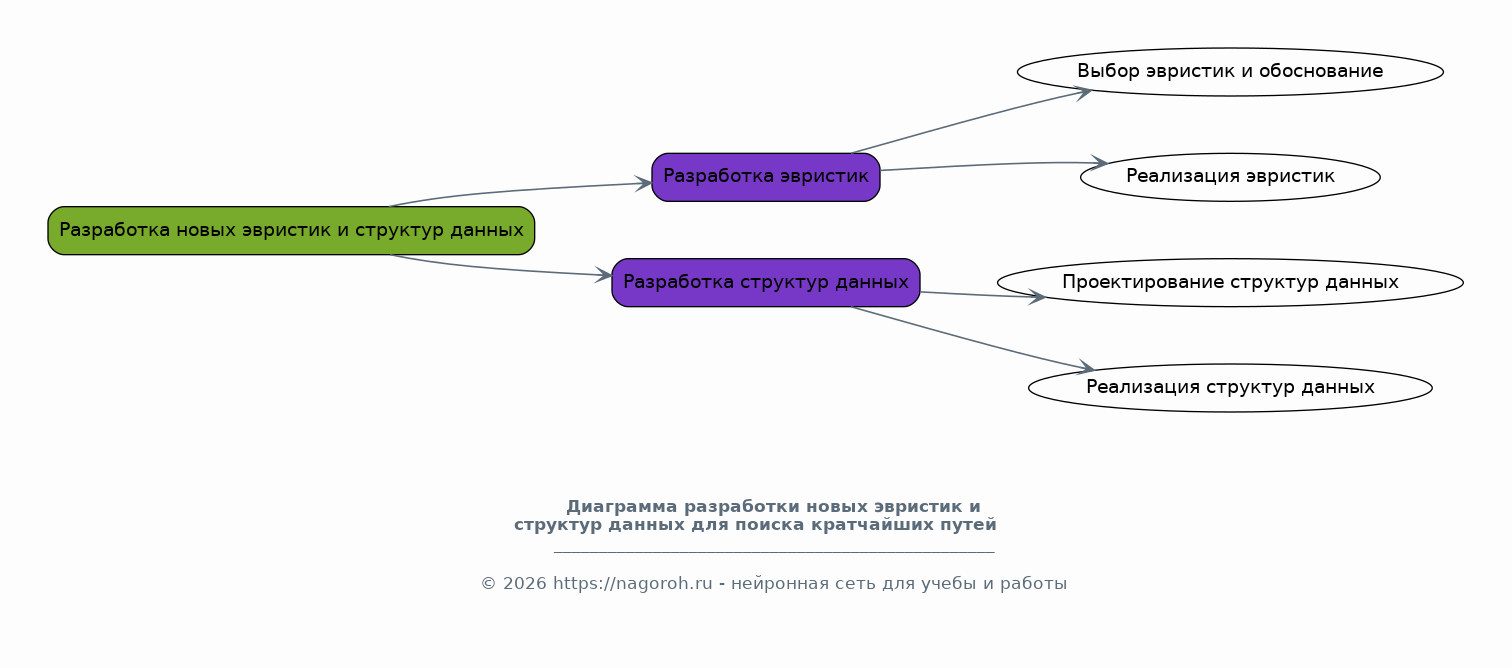
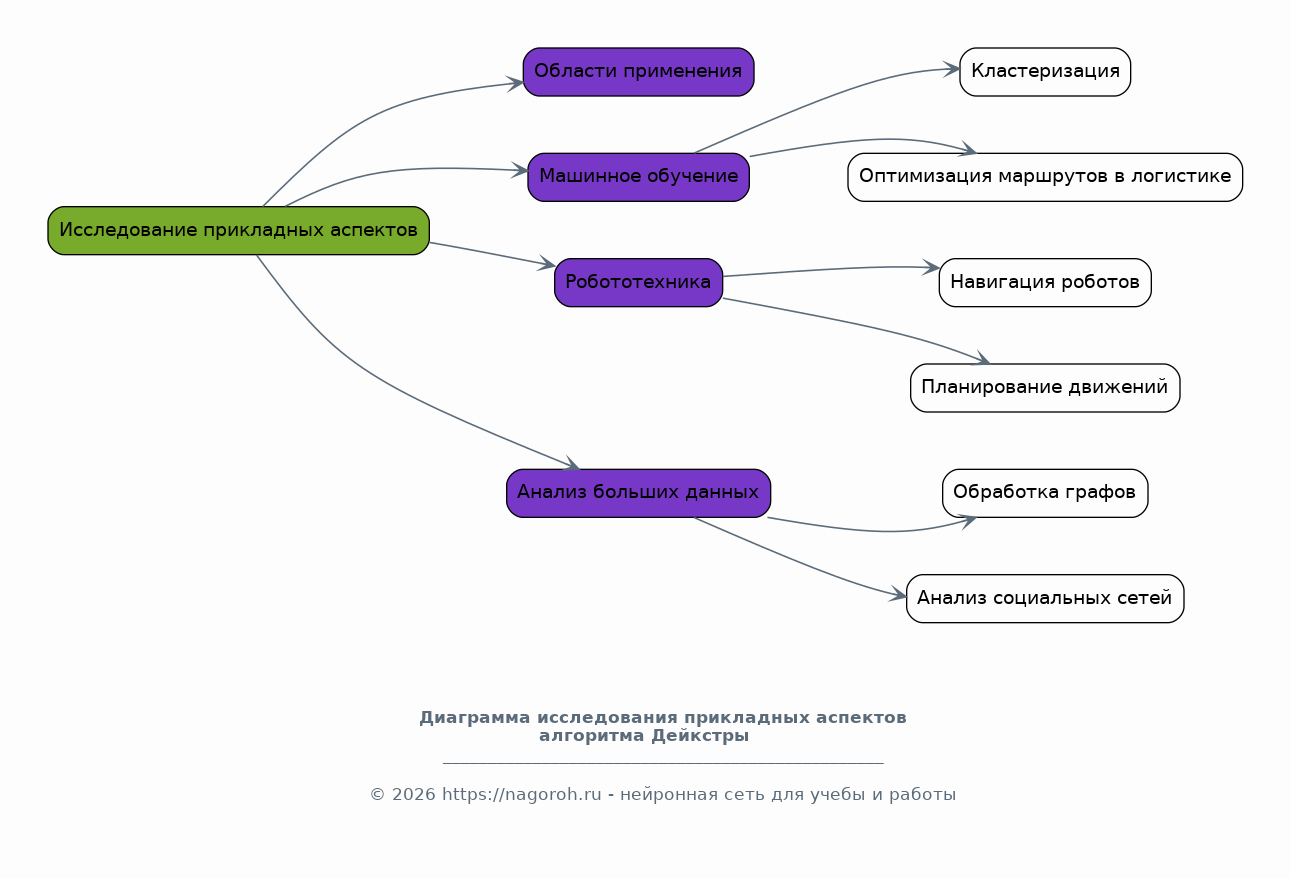
Данный проект посвящен глубокому анализу и модификации алгоритма Дейкстры для эффективного поиска кратчайших путей в высокоразмерных пространствах. В работе рассматриваются теоретические основы построения графов в многомерных условиях и их влияние на производительность классических алгоритмов. Особое внимание уделяется разработке новых эвристик и структур данных, способных снизить вычислительную сложность и ускорить процесс поиска оптимальных маршрутов. Проводятся сравнительные исследования производительности предложенных модификаций с существующими аналогами на различных наборах данных. Анализируются потенциальные области применения, включая задачи машинного обучения, робототехники и анализа больших данных, где многомерные представления и поиск путей являются критически важными.