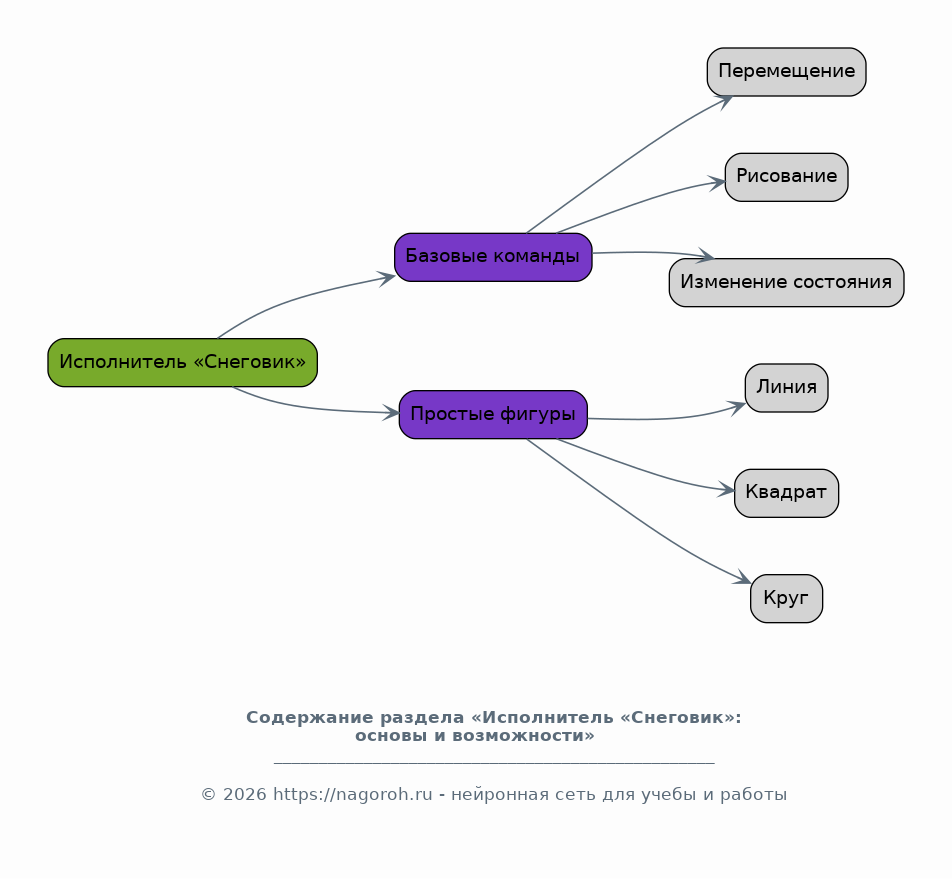
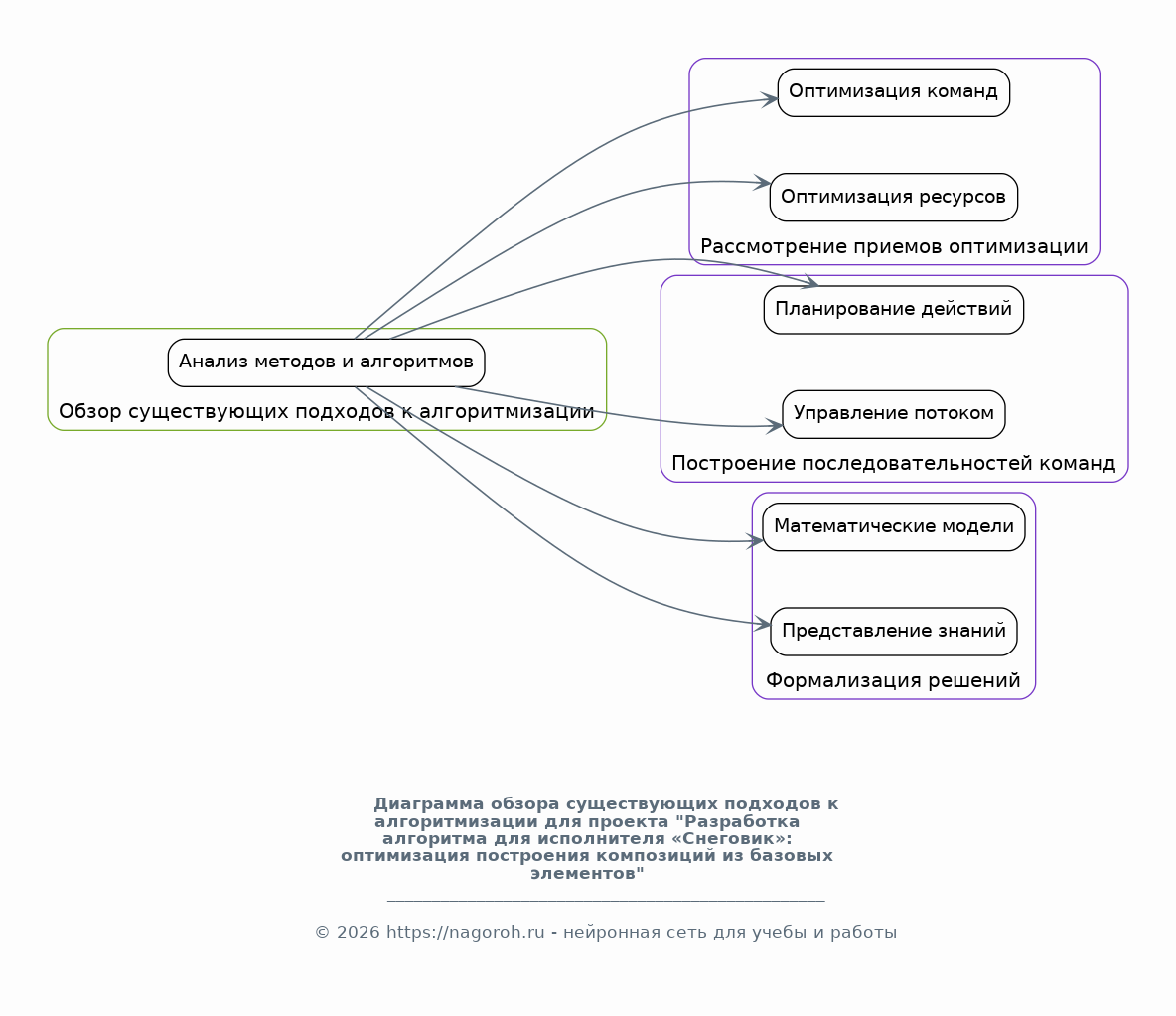
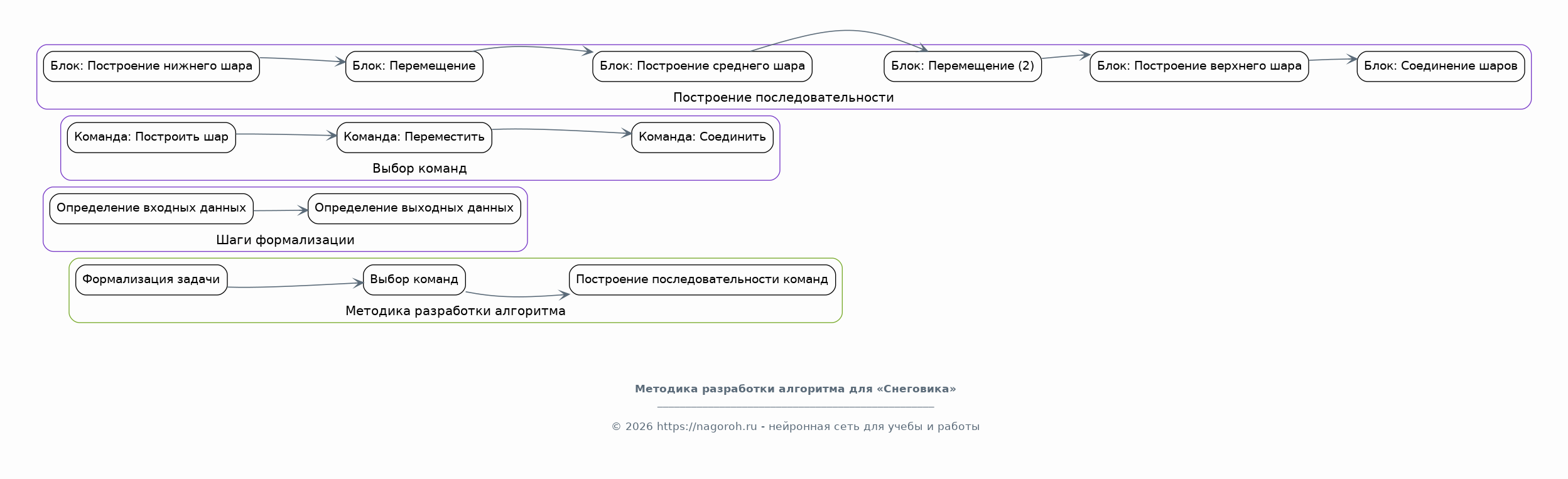
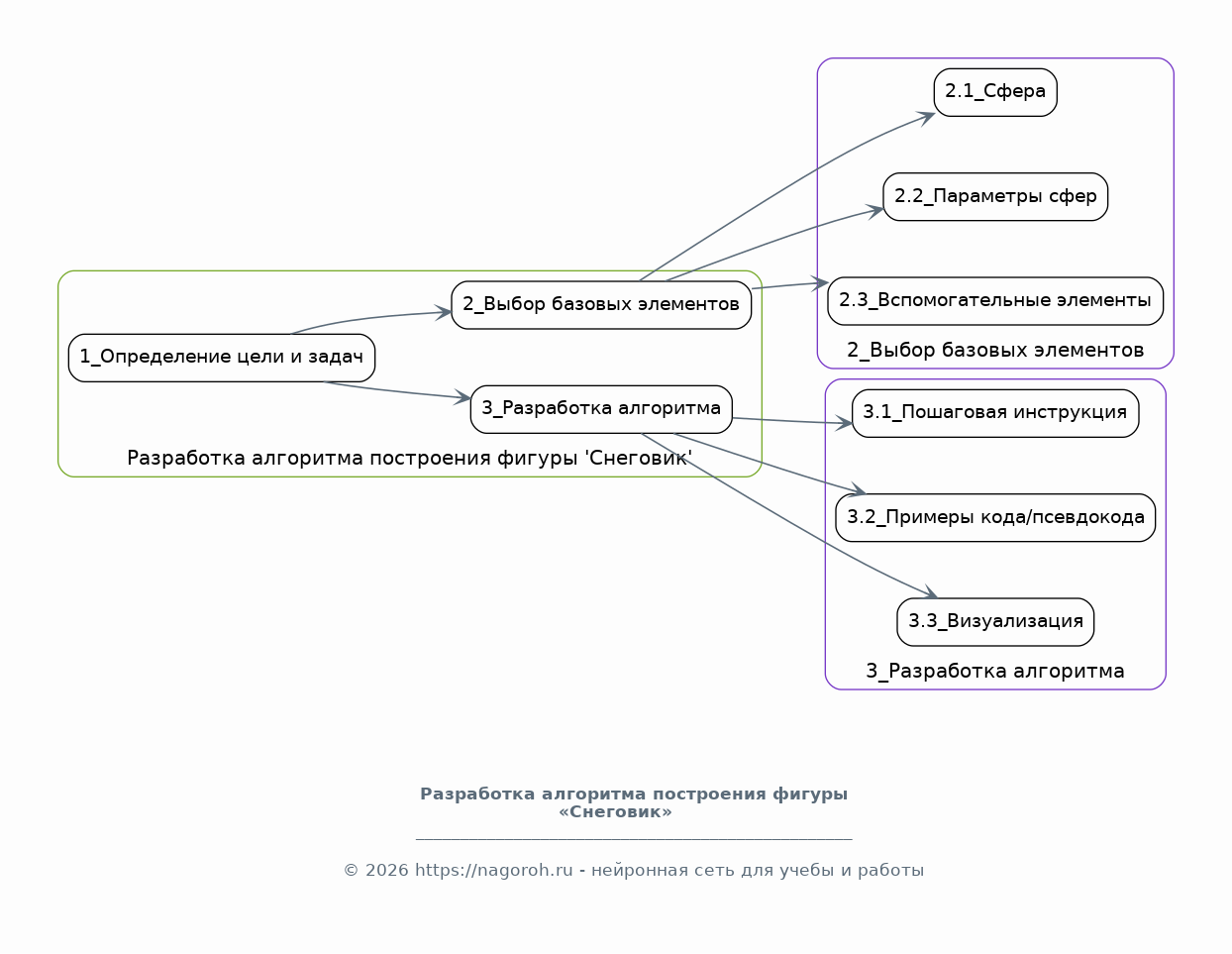
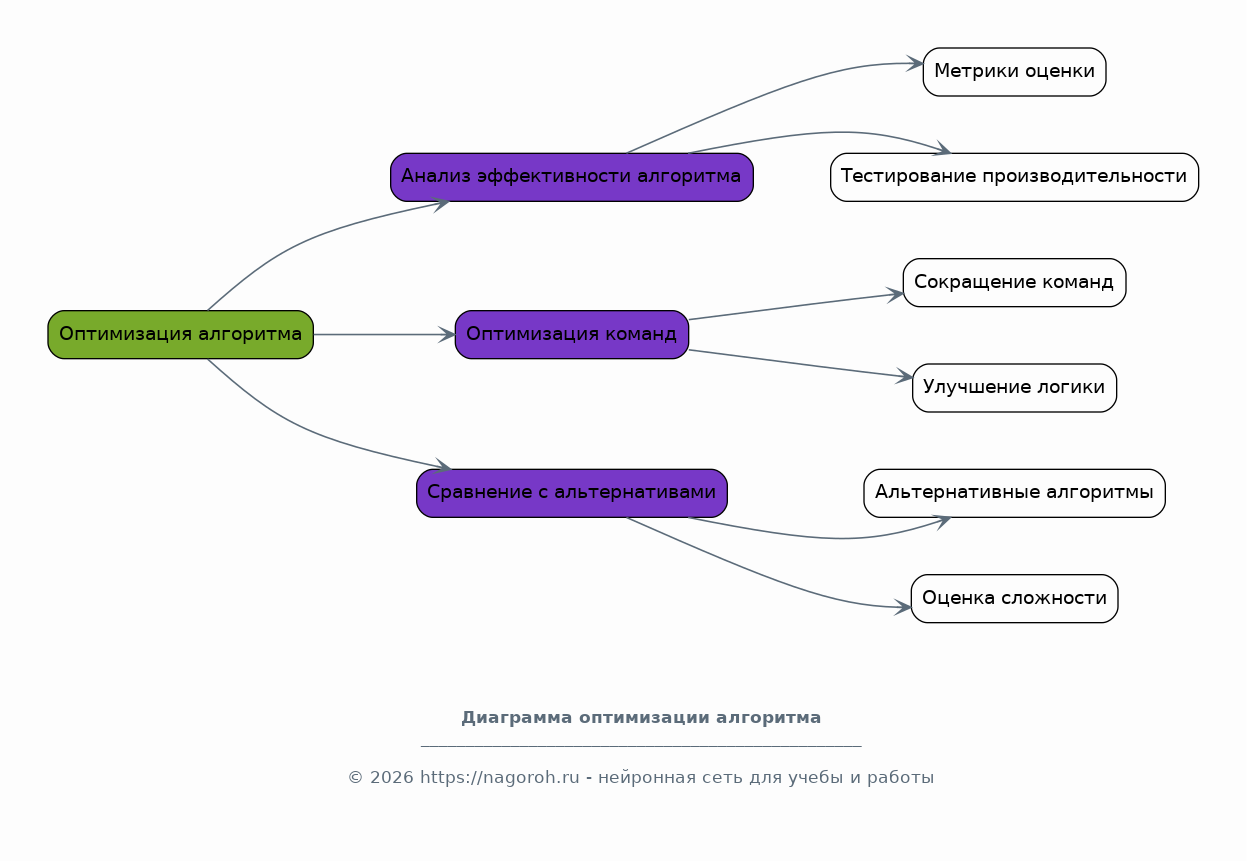
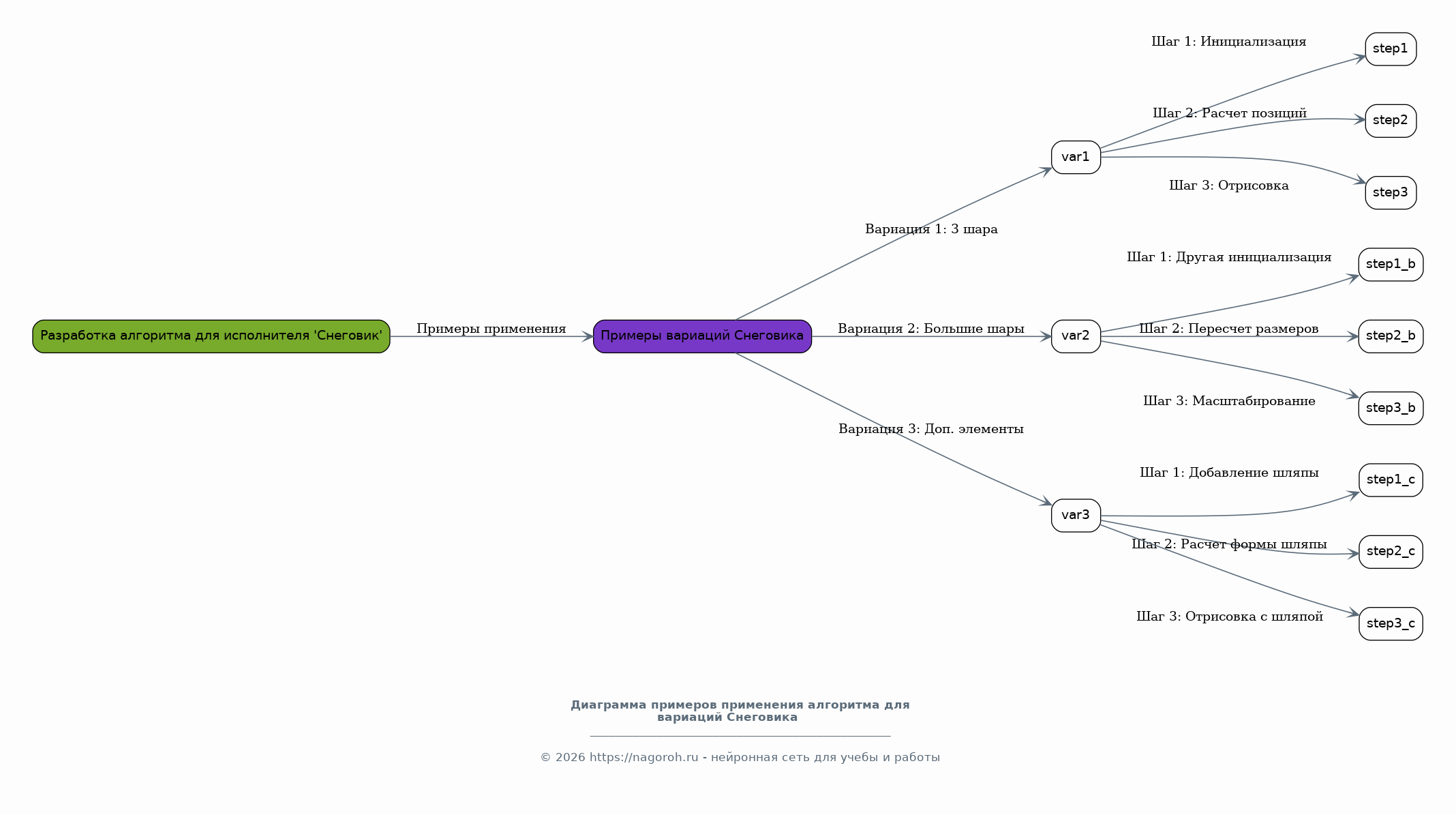
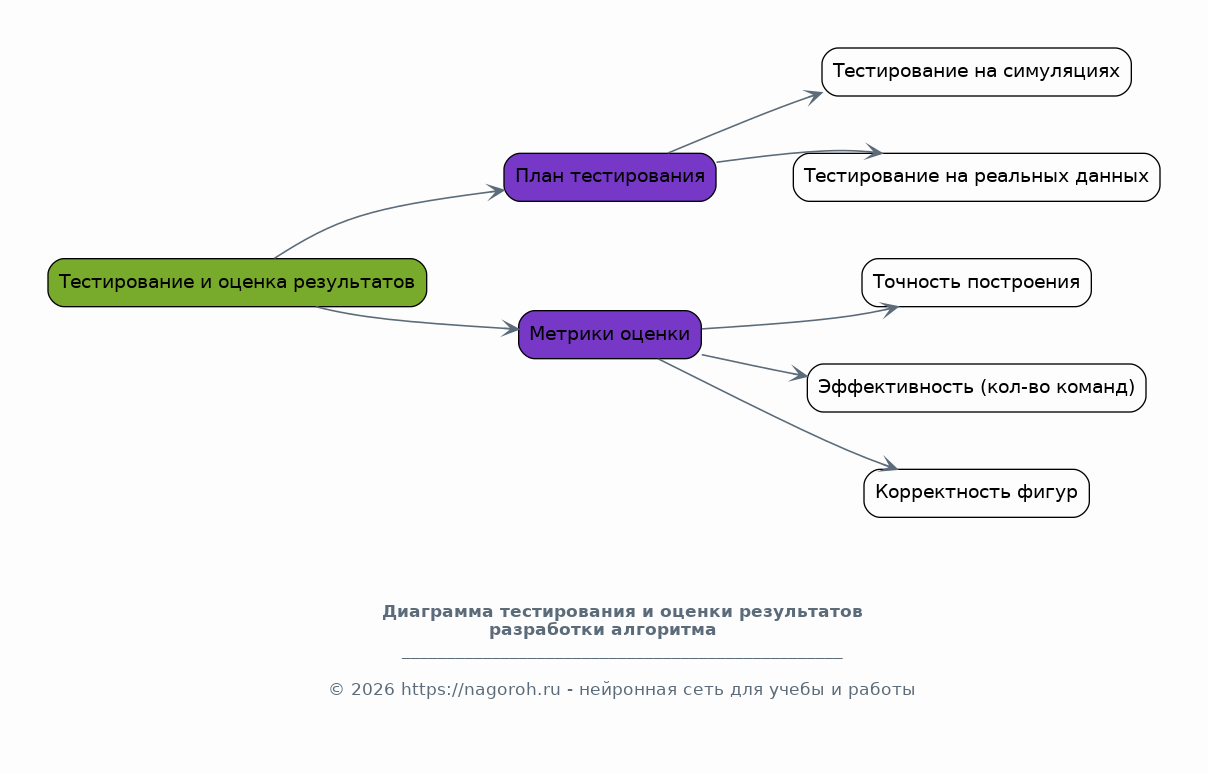
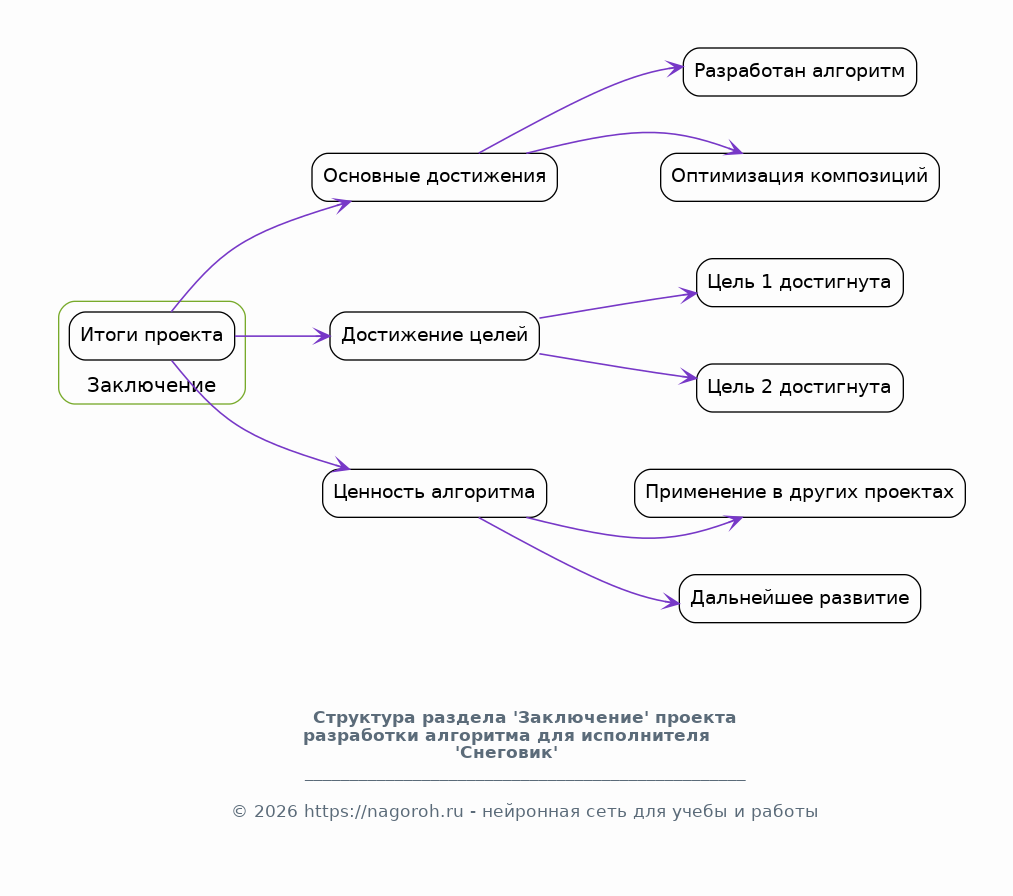
Данный проект посвящен исследованию и разработке эффективного алгоритма для управления исполнителя «Снеговик». Основной задачей является создание последовательности команд, позволяющей автоматически собирать заданные фигуры, например, классического снеговика из трёх шаров. В рамках работы анализируются различные подходы к построению таких алгоритмов, с акцентом на минимизацию количества шагов и оптимизацию движений исполнителя. Исследуются возможности использования базовых команд для формирования более сложных структур, что является фундаментом для дальнейшего развития систем автоматизированного проектирования и робототехники. Оценивается сложность итоговых программ для различных конфигураций «снеговиков» и предлагаются пути их упрощения.